#
Pulse
#
Pulse-specific parameters
#
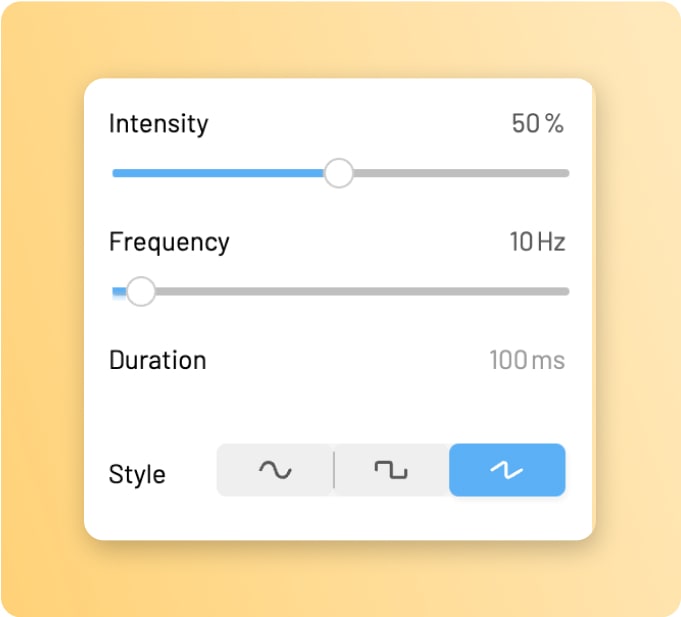
Intensity
The intensity parameter of a pulse determines how strong the pulse will feel.
- Minimum
- 1%
- Maximum
- 100%
#
Frequency
The frequency parameter determines how quickly the actuators will complete the pulse oscillation. High frequencies can feel like a sharp tick, whereas low frequencies can often be perceived like a heavy, strong click. If the frequency is too high, the intensity may be compromised and the pulse might feel weak.
The experience highly depends on the selected actuator. Low frequencies in combination with a square wave are often perceived as multiple pulses and sine waves can be barely perceived. Try out different values to tune it for your application!
- Minimum
- 1 Hz
- Maximum
- 500 Hz
#
Duration
All blocks have a duration parameter, specifying how long the block will be executed before proceeding to the next block.
- Minimum
- 1 ms
- Maximum
- 2000 ms
#
Waveform
⭐ Starter
The waveform selection determines how the actuators will be moved to render the pulse. There are three options: Sawtooth, Sine, and Square waves. All of them have different characteristics: Square waves are the sharpest and strongest of all the waveforms. They are particularly applicable for high frequencies, whereas at low frequencies, they can cause a perception of multiple pulses.
Sine waves are the smoothest of all the waveforms and generally minimize the auditive feedback. On the other hand, their smoothness also causes the perceived click intensity to be rather low.
Sawtooth waves combine some of the smoothness of sine waves with some of the sharpness of square waves. They are a good all-around choice across frequencies, but might not provide the maximum possible intensity at very high frequencies or the minimum auditive feedback.
- Options
- Sine, Square, Sawtooth

#
Invert
You can control the directional feedback of a pulse by toggling the invert state, in return, the actuator will accelerate in the opposite direction. This option works best with VoiceCoil actuators, but can also be applied to ERM actuators and LRAs.