#
Actuators and motors
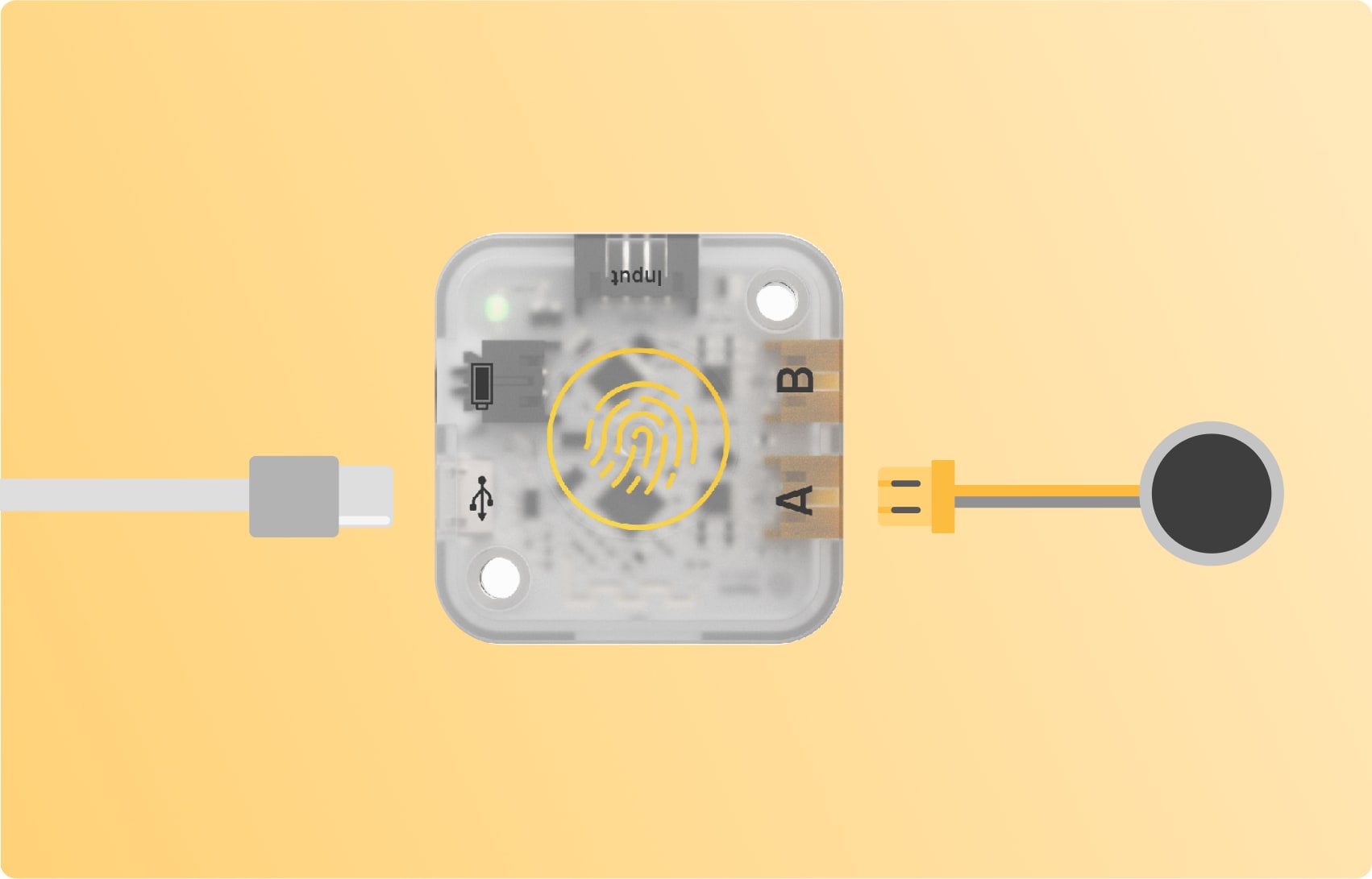
Vibration motors are also called haptic actuators. Two actuators can be attached to the satellite unit at the same time. The DevKit includes three types of electromagnetic actuators, a label indicates the specific model. To check for compatability with other actuators, reach out to our support.
#
Linear Resonant Actuators (LRAs)
LRAs are small sized actuators commonly found in smartphones. These actuators need little power because of their design, which uses a spring to store and keep energy. They work best and use the least energy when operated at their natural (resonant) frequency, allowing them to move with minimal energy loss. However, if they are run at frequencies far from their resonant frequency, the strength of the vibration weakens significantly and they need much more power. This limitation means they can only operate effectively within a narrow range of frequencies.
- Form factor
- Most often coin-sized, some rectangular
- Haptic design parameters
- Intensity, Frequency and Duration
- Power consumption
- Low when driver at the resonant frequency
- Electrical circuit
- Requires haptic driver IC to track the resonant frequency
#
Eccentric Rotating Mass (ERM)
ERMs have a relatively simple working principle: A mass is attached to a motor, with an offset to the rotating axis. Whenever the motor spins, it swings the mass around, which creates oscillating forces that are perceived as vibrations. This type of actuator is relatively limited in its feature set: The intensity and frequency of its vibrations are coupled and can therefore not be controlled independently.
- Form factor
- Most commonly coin-sized or cylindrical
- Haptic design parameters
- Intensity and duration
- Power consumption
- Low to high depending on the size
- Electrical circuit
- Haptic driver IC can help produce distinct clicks, but is not required
#
Voice coil (VC)
Voice-coil type actuators are based on the same principle that acoustic speakers work with: A mass is accelerated through electromagnetic energy to create a haptic signal.
Similar to acoustic speakers, these actuators support a wide range of different frequencies and amplitudes and are therefore the most versatile choice. Their drawbacks include a relatively high power demand and control complexity.
- Form factor
- Various form factors available
- Haptic design parameters
- Intensity, frequency and duration
- Power consumption
- Mid to high depending on size
- Electrical circuit
-
Haptic driver IC can help tune the signal, but not required